CAN bus communication Arduino? | ContextResponse.com
.
Then, can communication using Arduino?
Controlled Area Network of simple CAN is a bus standard that allows a Microcontroller and its peripheral devices to communicate without the need of a host device or a computer. Developed by Robert Bosch GmbH, CAN is protocol is main used in automobiles for communication between a control unit and its components.
Likewise, cAN protocol with Arduino? As Arduino doesn't contain any inbuilt CAN port, a CAN module called MCP2515 is used. This CAN module is interfaced with Arduino by using the SPI communication.
How to use CAN protocol in Arduino.
| Pin Name | USE |
|---|---|
| SI | SPI master output slave input lead |
| SCLK | SPI Clock pin |
| INT | MCP2515 interrupt pin |
Accordingly, cAN bus using Arduino?
The Serial CAN-BUS provides your Arduino or other MCU with the capability to communication to CAN Bus, such as hacking your vehicle. This Grove CAN-BUS module is controlled by UART, which means if your MCU has a UART interface, this serial CAN BUS is available.
CAN bus IDS?
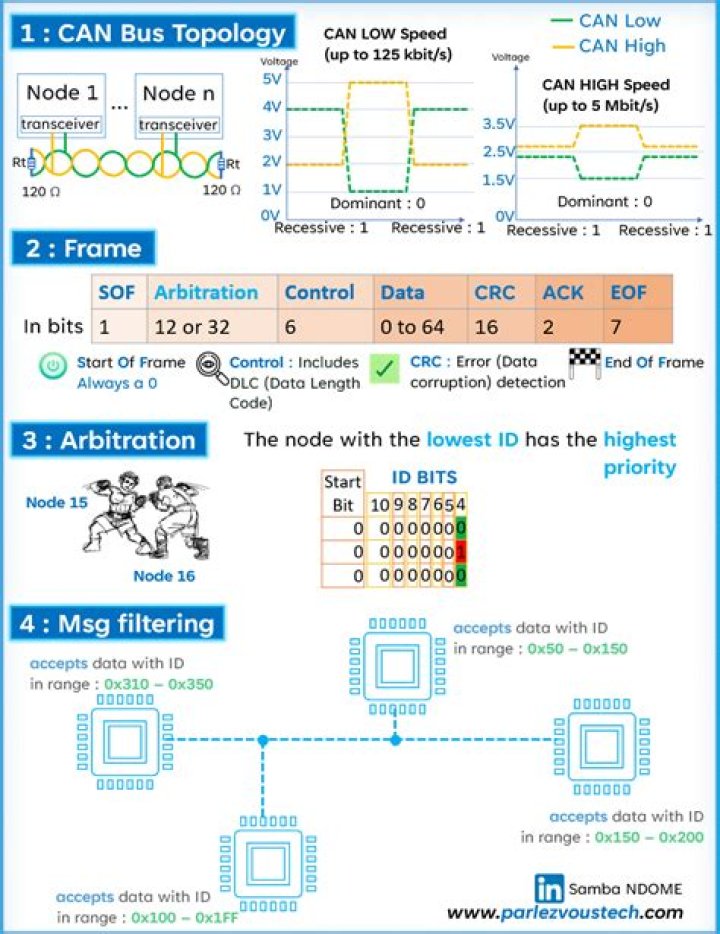
The Controller Area Network (CAN) which is also known as CAN bus is a message-based protocol. The arbitration identifier (ID) field for each transmitted CAN frame indicates packets priority. The lower the ID bit value signifies the higher priority of the packet.
Related Question AnswersWhat is CANbus interface?
A Controller Area Network (CAN bus) is a vehicle bus standard designed to allow microcontrollers and devices to communicate with each other in applications without a host computer.CAN bus to USB?
CANUSB Features Just plug the CAN bus USB interface into a standard USB port and it gives a USB to CAN DB9 male output to your CAN network. As the CANUSB draws its power from the USB bus, no external power supply is required.CAN bus distance?
The electrical characteristics of the CAN bus cable restrict the cable length according to the selected bit rate. You can use cabling up to 250 meters with the baud rate of 250 kbit/s. The maximum bus length with a bit rate of 10 kbit/s is 1 km, and the shortest with 1 Mbit/s is 40 meters.CAN bus speed?
Maximum Bus Speed The maximum speed of a CAN bus, according to the standard, is 1 Mbit/second. Low-speed CAN (ISO 11898-3, see above) can go up to 125 kbit/s. Single-wire CAN can go up to around 50 kbit/s in its standard mode and, using a special high-speed mode used e.g. for ECU programming, up to around 100 kbit/s.CAN bus messages?
All nodes in a CAN Bus network receive the same message at the same time, meaning each node “listens” to the network bus and will receive every transmitted message. The message filter guarantees that the receiving nodes will only react to data that is relevant to them.CAN bus with Raspberry Pi?
A PiCAN 2 HAT provides your Raspberry Pi with full CAN-Bus capability: CAN v2. 0B at 1 Mb/s and high-speed (10 MHz) SPI Interface. It uses the Microchip MCP2515 CAN controller with MCP2551 CAN transceiver. A PiCAN 2 HAT provides your Raspberry Pi with full CAN-Bus capability: CAN v2.CAN bus data analyzer?
The CAN BUS Analyzer Tool is a simple to use low cost CAN bus monitor which can be used to develop and debug a high speed CAN network. The CAN Analyzer tool supports CAN 2.0b and ISO 11898-2 (high-speed CAN with transmission rates of up to 1 Mbit/s).Can you frame a format?
The CAN protocol supports two message frame formats, the only essential difference being in the length of the identifier (ID). In the standard format the length of the ID is 11 bits and in the extended format the length is 29 bits. The message frame for transmitting messages on the bus comprises seven main fields.What is mcp2515?
Microchip Technology's MCP2515 is a stand-alone Controller Area Network (CAN) controller that imple- ments the CAN specification, Version 2.0B. It is capable of transmitting and receiving both standard and extended data and remote frames.CAN Bus based projects?
CAN BASED PROJECTS- A CAN BASED DISTRIBUTED CONTROL SYSTEM FOR AUTONOMOUS ALL-TERRAIN VEHICLE (ATV).
- WINDSCREEN WIPER CONTROL USING CAN BUS (HUMIDITY BASED)
- VIEW MIRROR CONSOLE CONTROLLING USING CAN BUS (CLOSED LOOP CONTROL SYSTEM)
- VEHICLE SAFETY APPLICATION USING CAN.
- VEHICLE DASH BOARD USING CAN COMMUNICATION.