What is state in state space model?
What is state in state space model?
State space model (SSM) refers to a class of probabilistic graphical model (Koller and Friedman, 2009) that describes the probabilistic dependence between the latent state variable and the observed measurement. The state or the measurement can be either continuous or discrete.
What is the use of state space model?
State-space models are models that use state variables to describe a system by a set of first-order differential or difference equations, rather than by one or more nth-order differential or difference equations.
How do you represent a system in state-space?
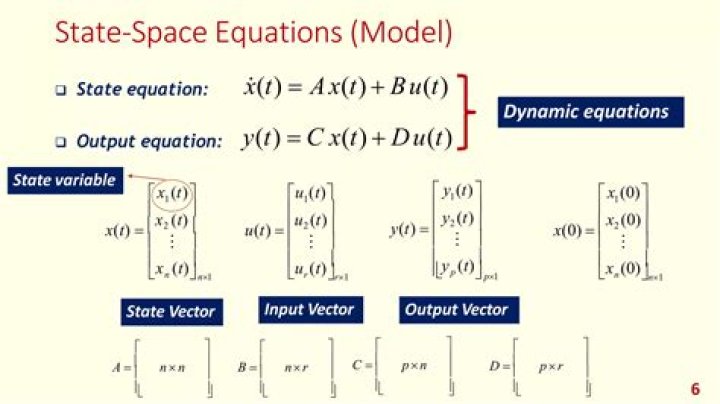
The state space representation of a system is given by two equations : Note: Bold face characters denote a vector or matrix. The variable x is more commonly used in textbooks and other references than is the variable q when state variables are discussed.
When a transfer function model is converted into?
When a transfer function model is converted into state-space model, the order of the system may be reduced during which one of the following conditions? The order of the system will never get changed. Pole, zero cancellation takes place. Some of the variables are hidden.
What is ABCD in state space?
A is the system matrix. B and C are the input and the output matrices. D is the feed-forward matrix.
What is state and state variable?
A state variable is one of the set of variables that are used to describe the mathematical “state”of a dynamical system. Intuitively, the state of a system describes enough about the system to determine its future behaviour in the absence of any external forces affecting the system.
What is ABCD in state-space?
What are the advantages of state space model analysis?
Advantages of State Space Techniques This technique can be used for linear or nonlinear, time-variant or time-invariant systems. It is easier to apply where Laplace transform cannot be applied. The nth order differential equation can be expressed as ‘n’ equation of first order. It is a time domain method.
How do you choose state-space variables?
The variable qwill be used here since we will often use x to represent position. Note several features: The state equation has a single first order derivative of the state vector on the left, and the state vector, q(t), and the input u(t) on the right. There are no derivatives on the right hand side.
Why do we convert any transfer function to state-space representation?
Converting from state space form to a transfer function is straightforward because the transfer function form is unique. Converting from transfer function to state space is more involved, largely because there are many state space forms to describe a system.